|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese
ENZYKLOPÄDIE DER FUNKELEKTRONIK UND ELEKTROTECHNIK Halbautomatische Bohrmaschine mit Laserpointer. Enzyklopädie der Funkelektronik und Elektrotechnik
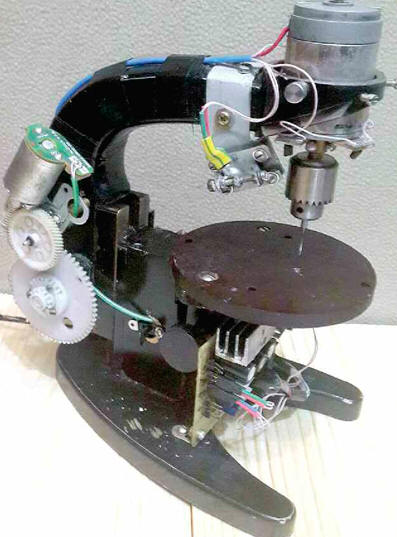
Lexikon der Funkelektronik und Elektrotechnik / Amateurfunk-Technologien Um Löcher in Leiterplatten zu bohren, verwenden viele Funkamateure sogenannte Mikrobohrer, bei denen es sich um einen Miniatur-Gleichstrommotor handelt, an dessen Schaft eine Bohrzange befestigt ist. Als Werkzeug zur Bearbeitung von Leiterplatten sind Mikrobohrer alles andere als ideal: Es ist ziemlich schwierig, ohne Stanzen genau in die Mitte eines zukünftigen Lochs zu gelangen, und es ist fast unmöglich, mit den Händen die genaue vertikale Position eines Mikrobohrers zu erreichen. Das Ergebnis ist ein minderwertiges „schräges“ Loch, dessen Mitte auf die andere Seite der Platte verschoben ist, oder sogar ein gebrochener Bohrer (ein teurer Hartmetallbohrer, der aus einem sehr zerbrechlichen Material besteht, kann besonders leicht zerbrechen). Material). Es gibt viele Optionen für Bohrmaschinen auf dem Markt, aber alle verfügen über einen manuellen Bohrvorschub und ein erhebliches Spiel, und die elektronische „Unterstützung“, die sie enthalten, besteht lediglich aus einer Stromversorgung und einem Drehzahlstabilisator für den Antriebsmotor. Mit der im Artikel beschriebenen selbstgebauten Bohrmaschine können Sie Löcher ohne vorherige Kernstanzung bohren. Die Logik seiner Funktionsweise wird von einem Mikrocontroller gesteuert. Teure Hartmetallbohrer brechen beim Arbeiten an dieser Maschine nicht. Dank der Verwendung solcher Bohrer wird die Qualität der Löcher verbessert – sie schneiden das Loch buchstäblich, sodass nach dem Bohren kein Schleifen der Folie erforderlich ist, wodurch die dünne Folie der Leiterbahnen noch dünner wird. Ich habe auf dieser Maschine mit einem Hartmetallbohrer (hergestellt in Deutschland) über 1500 Löcher gebohrt und sie ist immer noch nicht gebrochen und bohrt weiterhin qualitativ hochwertige Löcher. Ein billiger Bohrer hört in der Regel nach 10 bis 20 Löchern in foliertem Fiberglas auf zu bohren. Sie müssen daher die Drehzahl des Bohrers erhöhen und den Druck beim Bohren erhöhen, da sich dadurch Folienrollen um die Löcher bilden und diese nach dem Bohren gründlicher sind Ein Schleifen der Leiter ist erforderlich. Das Gerät (sein Erscheinungsbild links, rechts und hinten ist in Abb. 1-3 dargestellt) basiert auf dem heimischen MBI-3-Mikroskop der LOMO-Vereinigung. Sein Betrieb wird von einer Steuereinheit (CU) gesteuert, deren Diagramm in Abb. dargestellt ist. 4. Es basiert auf dem ATtiny45-Mikrocontroller [1]. Wenn Strom angelegt wird, stellt die Steuereinheit die Maschine in die Ausgangsposition, d. h. wenn sich ihr beweglicher Teil in der unteren oder mittleren Position befand, fährt sie automatisch in die obere Ausgangsposition. Anschließend wird das zu bearbeitende Brett unter den Laserstrahl positioniert (der Laserstrahl trifft sicher die Mitte des Lochs), mit der Hand auf den Arbeitstisch gedrückt und auf das Pedal gedrückt. In diesem Fall versorgt die Steuereinheit den Elektromotor, der das Spannfutter mit der Bohrmaschine und den Bohrervorschubmotor antreibt, mit Strom. Am Ende des Bohrens bringt der Bohrvorschubmotor die Maschine in den ursprünglichen Zustand zurück und die Steuereinheit schaltet die Stromversorgung beider Motoren ab. Die Maschine ist bereit, das nächste Loch zu bohren.
Als Laserpointer dient ein modifiziertes Lasermodul, das in Kinderspielzeugen zum Einsatz kommt. Es ist notwendig, den Laserkollimator auf eine kurze Distanz zu fokussieren und den Versorgungsstrom zu begrenzen, der so sein sollte, dass der Laser gerade zu leuchten beginnt. Dadurch erhält man einen dünneren Strahl (ich habe einen Durchmesser von 0,2 mm erreicht) und reduziert die Laserstrahlung auf ein sicheres Maß. Die Lasermontagebaugruppe ist in Abb. dargestellt. 5, und Zeichnungen seiner Teile sind in Abb. 6. Sockel 3 und Laserhalter 4 bestehen aus ca. 1 mm dickem Stahlblech (ich habe die Wände einer alten CD-ROM-Hülle verwendet). Nachdem Sie die erforderlichen Löcher in die Werkstücke gebohrt haben, biegen Sie die rechteckigen Blütenblätter am Halter 4 im rechten Winkel, um die Schraube mit dem Lasermodul zu befestigen. Das Modul ist zerlegt, der Lötbereich seines Messingkörpers und zwei M3-Muttern sind verzinnt. Stecken Sie die Schraube 4 (M5x3) in die Löcher der gebogenen Blütenblätter des Halters 28 und schrauben Sie die beiden Muttern 8 so darauf, dass sie zwischen den Ösen des Halters liegen (siehe Abb. 5). Der Laserkörper 2 wird unter Schraube 5 (zwischen Muttern 8) eingesetzt und mit Muttern verlötet, so dass er eng an der Halterung anliegt (dies ist für eine spielfreie Bewegung des Lasers beim Drehen der Schraube während des Justiervorgangs erforderlich) .
Als nächstes werden zwei weitere Muttern 5 auf das hervorstehende Ende der Schraube 1 aufgeschraubt (eine davon ist eine Kontermutter) und so angezogen, dass die Ösen des Halters 4 eine Bewegung der Schraube 5 entlang der Achse nicht zulassen . Wenn nun die Schraube im Uhrzeigersinn und in die entgegengesetzte Richtung gedreht wird, bewegt sich das Lasermodul von einem Auge zum anderen. Um den Halter mit dem Laser am Sockel 3 zu befestigen, werden an diesem auf der Rückseite vier Muttern angelötet (in Abb. 2 gut sichtbar). Anschließend werden vier Schrauben 7 (M3x15) mit Unterlegscheiben 6 unter den Köpfen von der Laserseite her in die entsprechenden Löcher des Halters gesteckt, mit zylindrischen Druckfedern bestückt und anschließend in die mit dem Sockel verlöteten Muttern verschraubt. Jetzt können Sie mit den Schrauben die Position des Lasers in verschiedene Richtungen anpassen. Die zusammengebaute Struktur wird auf dem Rohrhalter (dem oberen Teil des Mikroskops) ausprobiert, der Schaft der Basis des Laserhalters wird darum gebogen und mit einer scharfen Reißnadel werden die Konturen der Löcher in der Basis auf das Rohr übertragen In den Halter werden zwei Löcher mit einem Durchmesser von 2,5 und einer Tiefe von 10 mm gebohrt und ein M3-Gewinde hineingeschnitten. Befestigen Sie abschließend die Basis des Laserhalters mit M3-Schrauben am Mikroskop. Zum Vorschub des Bohrers wurde ein Elektromotor mit Schneckengetriebe von einem Videorecorder verwendet (ich habe das Gerät vor langer Zeit zerlegt, daher kann ich seinen Namen nicht nennen). Dieser Mechanismus (Abb. 7) wird mit drei Metallständern mit Innen- und Außengewinde M4 und der gleichen Anzahl M4-Schrauben am Mikroskop-Tubushalter befestigt. Das Getriebe wird mit drei M2,5-Schrauben und Muttern am Mikroskopgriff befestigt; die Löcher in beiden Teilen sind durchgehend. Bei der Montage ist Vorsicht geboten – die Fehlausrichtung von Getriebe und Griff sollte minimal sein.
Die Vorschubgeschwindigkeit wird durch den Trimmwiderstand R11 gesteuert. Der verwendete Elektromotor ist leistungsschwach (Nennspannung - 6 V, Strom - 30 mA), meistert seine Aufgabe aber dank des Schneckengetriebes recht gut. Das Design des Getriebes kann beliebig sein, es muss jedoch ausreichend Kraft aufbringen, um den Mikroskopgriff leicht drehen zu können. Sie können einen Schrittmotor verwenden. Im ersten Projekt habe ich genau das gemacht, aber der vorhandene Schrittmotor hatte nicht genügend Drehmoment auf der Welle und es war nicht möglich, einen passenden zu finden. Wer Interesse am Einsatz eines Schrittmotors hat, kann sich gerne über die Redaktion an mich wenden. Die Projektdateien sind erhalten geblieben. Es wurde der ATmega8-Mikrocontroller verwendet. Der Schlüssel am Verbundtransistor VT5VT6 schaltet den Bohrervorschubmotor ein und aus (er ist an den XP6-Stecker angeschlossen), Transistor VT2 und Relais K1 steuern seine Richtung: nach oben oder unten. Der Schlüssel am Verbundtransistor VT3VT4 steuert den Elektromotor des Bohrantriebs (er ist an den XP3-Stecker angeschlossen), ein Geschwindigkeitsstabilisator ist auf der DA1-Mikroschaltung und dem VT1-Transistor montiert und die Frequenz wird durch den Abstimmwiderstand R1 reguliert. Es macht keinen Sinn, einen komplexeren Drehzahlstabilisator zu verwenden, wie er beispielsweise in [2] vorgeschlagen wird, da es nicht erforderlich ist, den Bohrer „nach Augenmaß“ auf die Mitte des Lochs zu zielen. Zu diesem Thema wurden Experimente durchgeführt. Der DA6-Chip enthält einen Spannungsstabilisator für den Bohrvorschubmotor [3]. Die in Reihe geschalteten integrierten Stabilisatoren DA2 und DA5 dienen zur Erzielung stabilisierter Spannungen von 12 bzw. 5 V. Der erste von ihnen dient zur Stromversorgung der Stromstabilisatoren auf den Mikroschaltungen DA3, DA4, der zweite dient zur Stromversorgung des Mikrocontrollers und des Schalten Sie den VT2-Transistor ein. Die Kondensatoren C2, C3, C6 filtern, der Rest blockiert. Die Maschine verwendet LED-Beleuchtung. Der Hintergrundbeleuchtungsstrom und der Laserstrom werden stabilisiert: Der Laserstromstabilisator ist auf dem DA3-Chip montiert, und die Hintergrundbeleuchtungs-LEDs sind auf dem DA4-Chip montiert. Der Stabilisierungsstrom wird nach der Formel I = 1,25/R [3] berechnet und durch Auswahl der Widerstände R13 und R14 eingestellt. Dank des stabilisierten Stroms ist es möglich, mehrere Backlight-LEDs des gleichen Typs in Reihe zu schalten. Der Laser wird an den XP4-Stecker angeschlossen, die LEDs werden an den XP5 angeschlossen. Der XP7-Anschluss ist für den Anschluss eines Programmiergeräts vorgesehen. Der Zweck seiner Kontakte entspricht dem Programmierer „TRITON+ V5.7T USB“ [4]. Das Mikrocontrollerprogramm wurde in der integrierten Umgebung Code VisionAVR V2.05 [5, 6] entwickelt. An den XP2-Anschluss sind ein Zweipositionssensor für die äußerste obere und untere Position des Bohrers und ein Bohrstartknopf angeschlossen. Letzterer ist mit den Kontakten 2 und 4 verbunden, der obere Positionssensor – mit den Kontakten 1 und 4, der untere – mit den Kontakten 3 und 4. Sensor und Taste haben normalerweise offene Kontakte, die bei Auslösung mit einer gemeinsamen Verbindung verbunden sind Draht. Als Taster dient ein im Pedal montierter Endschalter. Der Positionssensor wird von einem DVD-Player eines Musikcenters verwendet. Die Auslösung des Sensors in der unteren Position ist so eingestellt, dass der Bohrer maximal 1 mm unter das zu bearbeitende Brett fällt. Der obere Positionssensor regelt den maximalen Hub des Bohrers; mehr als 20 mm macht keinen Sinn. Die Einstellung erfolgt durch Verschieben der Ständer aus elastischem Draht 3 (Abb. 8), die mit Schrauben 6 (M3) an der Halterung 5 befestigt sind. Die Schrauben werden durch einen Schlitz in der Halterung in rechteckige Platten mit Gewinde eingeschraubt, was Ihnen ermöglicht um die Anschläge nach oben und unten zu bewegen. Anstelle von Standardmuttern werden Gewindeplatten verwendet, damit die Position der Pfosten ohne Werkzeug in der gefundenen Position fixiert werden kann, um zu verhindern, dass sich die Muttern beim Anziehen der Schrauben 6 verdrehen. Die Platten können an die Muttern angelötet werden. Die Halterung wird mit Schrauben 4 am Tubushalter befestigt, und Sensor 2 wird an einer L-förmigen Halterung befestigt, die an der Basis des Mikroskops angeschraubt wird. Die Zeichnung der Halterung 5 ist in Abb. dargestellt. 9 ist es, wie auch die Laserhalterteile, aus Stahlblech gefertigt.
Die Versorgungsspannung der Maschine hängt vom verwendeten Bohrantriebsmotor ab, sollte jedoch nicht niedriger als 14 V sein. Ich habe einen Druckkopfbewegungsmotor von einem Canon-Tintenstrahldrucker mit einer Nennversorgungsspannung von 24 V verwendet. Die Versorgungsspannung der Maschine betrug ausgewählt mit einem Einstellspielraum von 30 V. Der Stromverbrauch des gesamten Geräts im eingeschwungenen Zustand (Bohren) beträgt 1,5 A, beim Starten der Motoren steigt er kurzzeitig auf 3 A an. Somit muss das Netzteil eine Ausgangsspannung von 30 V bei einer Stromaufnahme von mindestens 3 A liefern. Ich verwende ein selbstgebautes Schalt-Labornetzteil mit einem Linearstabilisator 0...50 V, 0...10A. Die Strombegrenzung sorgt für einen sanften Start der Motoren. Die Teile des Steuergerätes sind auf einer Leiterplatte aus einseitig folienbeschichtetem Fiberglas montiert, gefertigt nach der Zeichnung in Abb. 10. Das Muster aus gedruckten Leitern wird aufgebracht, indem ein Bild von einem Fotonegativ auf eine mit Fotolack beschichtete Werkstückfolie belichtet wird. Eine negative Fotomaske kann mit einem Tintenstrahldrucker in höchster Qualität gedruckt werden.
Festwiderstände R3, R7-R9, R15, Keramikkondensatoren C1, C4, C5, C7 (alle Größe 0805 für Oberflächenmontage) und Mikrocontroller DD1 (im SOIC8-Gehäuse) werden direkt auf die Leiterbahnen gelötet. Die restlichen Widerstände sind MLT-0,25, die Kondensatoren sind importierte Oxidkondensatoren. Transistoren VT1, VT4, VT6 – jede Serie KT805, KT819, VT3, VT5 – VS337, VS547, 2N2222, Serie KT315, KT3102; VT2 - BC337, 2N2222, eine der Serien KT630, KT815, KT972 (der Maximalwert seines Kollektorstroms darf nicht geringer sein als der Betriebsstrom von Relais K1). Als VT5VT6-Taste können Sie einen Transistor der Serie KT829 oder KT972 verwenden, und für eine VT3VT4-Taste können Sie einen KT827- oder KT829-Transistor mit beliebigem Buchstabenindex verwenden. Relais K1 - R40-11D2-5/6, es ist durch jedes andere mit einer Betriebsspannung von 5 V und mit zwei Gruppen von Schaltkontakten austauschbar, die für einen Schaltstrom von mindestens 1 A ausgelegt sind. Durch Anschließen können Sie ein 12-V-Relais verwenden Der obere (gemäß Diagramm) Anschluss seiner Wicklungen (zusammen mit der Diode VD1) an den Ausgang (Pin 3) des DA2-Chips. Die Steuerplatine wird unter dem Tisch installiert und mit M3-Schrauben durch die Ecken an der Basis des Mikroskops befestigt (siehe Abb. 1). Die Chips DA2 und DA5 sind auf Kühlkörpern verbaut. Es empfiehlt sich, den Transistor VT1 mit einem Kühlkörper auszustatten. Der Tisch besteht aus Textolith. Vor dem Umbau zur Bohrmaschine muss das Mikroskop zerlegt werden, das eher zähflüssige Schmiermittel, das die Bewegung des Tubushalters (Oberteil des Mikroskops) behindert, gründlich abgewaschen und z. B. mit flüssigem Schmiermittel geschmiert werden , Transformatorenöl. Die Bewegung des Oberteils sollte möglichst leichtgängig, leichtgängig und spielfrei erfolgen. Auf die Verwendung einer klassischen Spannzange zur Befestigung des Bohrers wurde verzichtet. Für Bohrer mit einem Durchmesser von 0,3–4,5 mm werden ein Morsekegel und ein Dreibackenfutter verwendet. Die Verbindung zwischen Motor und Kartusche muss reibungslos sein. Der Laserpunkt auf der zu bearbeitenden Platte wird mit Hilfe von Schrauben in der folgenden Reihenfolge eingestellt: In eine Glasfaserfolienplatte, die derjenigen ähnelt, aus der die Platte besteht, wird ein Loch gebohrt, dann wird der Laserpunkt mit der Justierschraube genau auf das Loch eingestellt Schrauben des Halters. In diesem Fall müssen Sie versuchen, die Platte nicht zu verschieben. Meiner Erfahrung nach trat der Laserstrahl in das Loch ein und wurde justiert, wenn der Laserpunkt verschwand (nicht mehr von der Folie reflektiert wurde). Die Dicke des Glasfaserlaminats sollte mit der Dicke der herzustellenden Platte übereinstimmen. Danach können Sie sicher sein, dass der Laser die Mitte des zukünftigen Lochs genau anzeigt. Bei wartungsfähigen Teilen und fehlerfreier Installation muss das Steuergerät nicht justiert werden. Die Maschine ist seit mehr als einem Jahr in Betrieb. Während des Betriebs sind beide Hände frei und somit ein komfortables Arbeiten an der Maschine möglich. Ich habe keinen einzigen Bohrer kaputt gemacht, obwohl ich ziemlich oft Bretter herstelle, und ich kann mir nicht vorstellen, wie ich vorher ohne diese Maschine ausgekommen bin. Jetzt kaufe ich selbstbewusst hochwertige, teure Bohrer. Das Bohren von 50 Löchern dauert nicht länger als eine halbe Stunde. Dennoch ist Vorsicht geboten: Bei der Installation der Platte auf dem Arbeitstisch der Maschine besteht die Gefahr, dass der zerbrechliche Bohrer zerbricht und versehentlich gegen den Bohrer stößt. Die Wahrscheinlichkeit, dass der Bohrer während des Bohrens bricht, ist gering, es sei denn, Sie bewegen das Brett während dieser Zeit. Das Mikrocontroller-Programm sowie Negativ- und Positiv-Fotovorlagen im .pdf-Format zum Übertragen des Musters von Leiterbahnen auf einen Leiterplattenrohling können heruntergeladen werden von ftp://ftp.radio.ru/pub/2015/07/stanok.zip. Literatur
Autor: I. Parschin
Eine neue Möglichkeit, optische Signale zu steuern und zu manipulieren
05.05.2024 Primium Seneca-Tastatur
05.05.2024 Das höchste astronomische Observatorium der Welt wurde eröffnet
04.05.2024
▪ Magic Leap 1 Mixed-Reality-Headset ▪ Die globale Erwärmung wird den Nordpol für die Schifffahrt öffnen ▪ Intel Clover Falls Hilfschip
▪ Abschnitt der Garland-Website. Artikelauswahl ▪ Artikel Du nimmst es nicht nach deinem Rang! Populärer Ausdruck ▪ Artikel Wie schnell war der Sieger der ersten Rennen in den USA? Ausführliche Antwort ▪ Artikel Schnelles LED-Feuer (Option 2). Enzyklopädie der Funkelektronik und Elektrotechnik
Startseite | Bibliothek | Artikel | Sitemap | Site-Überprüfungen
www.diagramm.com.ua |










 Hinterlasse deinen Kommentar zu diesem Artikel:
Hinterlasse deinen Kommentar zu diesem Artikel: