|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese
ENZYKLOPÄDIE DER FUNKELEKTRONIK UND ELEKTROTECHNIK Akustisches Ortungsgerät für ein Auto. Enzyklopädie der Funkelektronik und Elektrotechnik
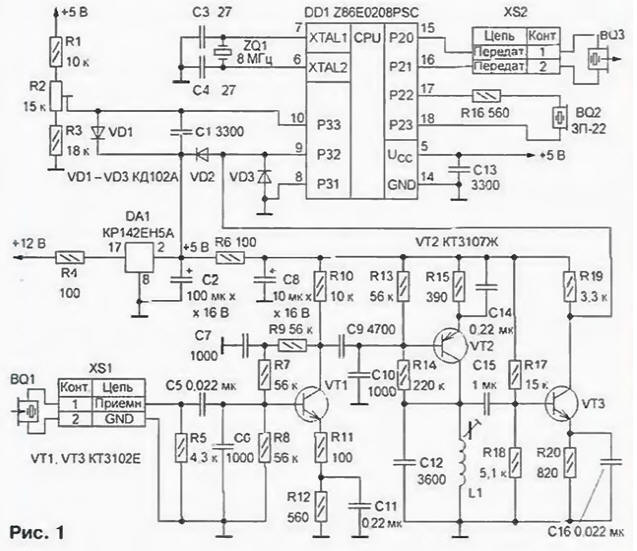
Lexikon der Funkelektronik und Elektrotechnik / Automobil. Elektronische Geräte Beim Rückwärtsfahren kann der Autofahrer einen bestimmten Bereich des Straßenraums nicht sehen. Dieser Bereich ist bis zu zwei Meter lang und kann Menschen oder Tiere sowie Gegenstände enthalten, die die Bewegung behindern. Fortschritte in der modernen Technologie machen es möglich, spezielle Geräte zu entwickeln, die den vorgegebenen Raum anzeigen und den Fahrer informieren, wenn auf dem Weg des Fahrzeugs Objekte angetroffen werden. Dieses Problem lässt sich am besten mit der gepulsten akustischen Ortung lösen. Erfolgreiche Versuche, solche Geräte zu bauen, sind bekannt (siehe beispielsweise das Buch von Shiga X., Mizutani S. „Introduction to Automotive Electronics.“ - M.: Mir, 1989). Aufgrund ihrer Komplexität und hohen Kosten haben diese Ortungsgeräte jedoch noch keine breite Anwendung gefunden. Das den Lesern angebotene akustische Ortungsgerät basiert auf dem Z8-Mikrocontroller. Es ist für Funkamateure einfach und leicht nachzumachen. Bei entsprechender Änderung des Programms und Designs kann es als unverzichtbarer Helfer für Blinde, als Sicherheitsgerät für Räumlichkeiten, als tragbares Echolot für einen Hobbyfischer, als berührungslose Flüssigkeitsstandanzeige usw. verwendet werden. Das schematische Diagramm des Ortungsgeräts ist in Abb. dargestellt. 1. Seine Basis ist ein Mikrocontroller (MK) Z86E0208PSC (DD1).
Der externe Zeitkreis des MK besteht aus einem Quarzresonator ZQ1 mit einer Frequenz von 8 MHz und Kondensatoren C3. C4. Der Ultraschallsender BQ3 wird direkt an die Pins des P2-Ports des MK angeschlossen. Der Erregerspannungshub am Emittereingang beträgt 10 V. Die Dauer der Impulsfolge beträgt 1 ms. Das vom Ultraschallempfänger BQ1 empfangene reflektierte Signal wird dem Eingang eines dreistufigen Resonanzverstärkers zugeführt, der aus den Transistoren VT1-VT3 besteht. Von seinem Ausgang wird ein Signal mit einem konstanten Anteil von 2.5 V dem nicht injizierenden Eingang (P32) des eingebauten Komparators des MK zugeführt. Der invertierende Eingang des Komparators (RZZ) erhält vom Teiler R2.7R1 eine Referenzspannung von 3 V. Dies gewährleistet die Auswahl des nützlichen reflektierten Signals auf der Ebene der empfangenen Interferenz. Der Referenzspannungskreis ist zusätzlich durch eine Begrenzungsdiode VD1 und einen Kondensator C1 vor Störungen geschützt. Die Dioden VD2 und VD3 begrenzen den Momentanwert des reflektierten Signals auf Werte von 0 und 5 V. Ein Piezosender BQ2 erzeugt ein akustisches Signal, das den Fahrer vor der Anwesenheit eines Hindernisses im unsichtbaren Bereich warnt. über den Widerstand R16 direkt mit den Anschlüssen von Port P2 des MK verbunden. Das Ortungsgerät wird mit einer Spannung von 12 ± 2.5 V vom Ziel der Rückfahrsignalleuchten des Fahrzeugs versorgt. Der DA1-Chip stabilisiert die Versorgungsspannung auf dem Niveau von 5 V, was für den normalen Betrieb des MK erforderlich ist. Im Stromversorgungskreis des Gerätes ist ein Filter bestehend aus den Kondensatoren C2, C8, C13 und dem Widerstand R6 eingebaut. Das Funktionsprinzip des Ortungsgeräts basiert auf der Aussendung einer Reihe von Ultraschallfrequenzimpulsen und dem anschließenden Empfang des von einem Hindernis reflektierten Signals. Die Zeit vom Zeitpunkt der Aussendung bis zum Empfang des reflektierten Signals ist direkt proportional zur Entfernung zum Objekt. Abhängig von der Entfernung erzeugt das Ortungsgerät eines von zwei akustischen Warnsignalen: Bei weniger als 1 m werden häufige Tonmeldungen erzeugt, bei 1 bis 2 m seltene. Bei einer Entfernung von mehr als 2 m erfolgt kein Tonsignal. Die Wartezeit auf das reflektierte Signal beträgt 60 ms, danach wird der nächste Impulsstoß ausgesendet und der Vorgang wiederholt. Die Funktionsweise des Geräts wird anhand der Grafik [1] in Abb. näher erläutert. 2 Es umfasst vier Eckpunkte – Zustände: SENDEN (TRANSFER) – Bildung eines Ultraschallimpulsstoßes; PRESS (Unterdrückung) – Unterdrückung des Nachklangs des Senders; WAIT – Warten auf das reflektierte Signal und COUNT – Berechnen der Entfernung zum Objekt.
Übergänge zwischen Zuständen, dargestellt durch die Bögen des Diagramms, werden durch die folgenden direkten (durch einen Buchstaben gekennzeichnet) und indirekten (zwei Buchstaben entsprechend dem Übergang) Ereignisse verursacht: t (Timer – Timer) – Aktivierung des MK-Timers, s (Komparator – Komparator) – Betrieb des MK-Komparators, ws (Warten – Senden) – Ende des Wartens auf das reflektierte Signal, cs (Zählen – Senden) – Ende der Berechnung der Entfernung zum Objekt und pw (drücken – warten) - Ende des Countdowns der Unterdrückungszeit. Beim Einschalten wird das Gerät automatisch zurückgesetzt und der SEND-Zustand initialisiert. Die Hauptfunktion dieses Zustands besteht darin, die Bildung einer Ultraschallimpulsfolge mit einer Dauer von 1 ms zu ermöglichen. Bei Auslösung versetzt der MK-Timer das Gerät in den PRESS-Zustand, in dem es nicht auf das empfangene reflektierte Signal reagiert. Die Dauer dieses Zustands wird durch die Anzahl der Auslösungen des Timers bestimmt, die je nach Typ des verwendeten Ultraschallwandlers geändert werden kann. Am Ende des Countdowns der Unterdrückungszeit versetzt die nächste Aktivierung des Timers das Gerät in den WAIT-Zustand. Im WAIT-Zustand wartet das Ortungsgerät auf die Ankunft eines nützlichen reflektierten Signals, das den MK-Komparator auslöst. Speichern der Zeit vom Senden bis zum Empfang des Nutzsignals und Übergang in den COUNT-Zustand. Der Zeitzählvorgang im WAIT-Zustand wird durch das Auslösen des MK-Timers jede Millisekunde synchronisiert. Wenn nach 60 ms der MK-Komparator in diesem Zustand nicht funktioniert, geht das Gerät zurück in den SEND-Zustand. Wenn der Komparator ausgelöst wird, geht er in den COUNT-Zustand über. Im COUNT-Zustand zählt der Locator weiterhin das 60-ms-Zeitintervall. Anschließend wird anhand der zuvor aufgezeichneten Zeit vom Zeitpunkt des Sendens bis zum Empfang des Signals die Entfernung zum Objekt berechnet. Entsprechend dem Berechnungsergebnis steuert das Gerät die Ausgabe eines Audiosignals mit dem erforderlichen Signalpausenintervall. Wenn die Berechnung abgeschlossen ist, wechselt es in den SEND-Zustand. Dann wird der Arbeitszyklus wiederholt. Im Ortungsgerät können alle kleinen Keramik- und Oxidkondensatoren verwendet werden. Die Spule L1 ist auf einen einteiligen einheitlichen Rahmen mit einem Durchmesser von 8 und einer Wicklungsabschnittslänge von 7 mm gewickelt. Trimmer - Ferrit (100NN) mit einem Durchmesser von 2,8 und einer Länge von 12 mm. Die Spule enthält 860 Windungen, Windung um Windung mit 0,15 PEL-Draht gewickelt (Induktivität 4.4 mH). Widerstand R2 - SP5-2 oder ein anderer kleiner Multiturn-Trimmer. Piezokeramischer Schallgeber BQ2 - ZP-22 oder ähnlich. Transistoren VT1. VT3 – alle aus der KT3102-Serie. VT2 – eine beliebige KT3107-Serie. Der Ultraschallsender BQ3 und der Empfänger BQ1 sind identisch. Die Version des Autors verwendet Ultraschallwandler des industriell hergestellten Sicherheitsgeräts „Echo-2“, es können alle geeigneten piezokeramischen Wandler, auch selbstgebaute, mit den gleichen Betriebsfrequenzen im Bereich von 36...38 kHz verwendet werden [ 2]. Für den Anschluss werden importierte DJK-Stecker verwendet (ihre DJK-2MR-Buchsen sind auf der Platine verbaut und die Verbindungskabel sind mit DJK-2F-Steckern ausgestattet). Codes "Firmware" ROM MK sind in der Tabelle aufgeführt. Die Menge des Programmcodes beträgt 242 Bytes.
Konstruktiv besteht das Ortungsgerät aus einer Elektronikeinheit und einem Sender und Empfänger gleicher Bauart. Die Teile der Elektronikeinheit sind auf einer Leiterplatte aus Folienfiberglas gemäß Abb. montiert. 3.
Die Platine befindet sich in einem Kunststoffgehäuse des Funkdesigners „Intercom Device“, hergestellt von JSC „Novgorod Machine-Building Plant“. Das Aussehen des zusammengebauten Ortungsgeräts ist in Abb. dargestellt. 4.
Um den akustischen Einfluss des Senders auf den Ultraschallempfänger zu reduzieren, sind ihre Schallpfade in Form von Hörnern ausgeführt. Darüber hinaus gleicht das Horn die relativ hohe akustische Gesamtimpedanz des Wandlers mit dem eher geringen Widerstand der Last, also des Mediums Luft (3), aus. Am effektivsten ist ein Exponentialhorn, dessen Querschnittsfläche nach dem Gesetz S = S0em variiert, wobei S die Querschnittsfläche des Horns im Abstand x vom Wandler ist, S0 die Fläche des Horneinlasses (bei x = 0), also die Oberfläche des Wandlers, m ist der Hornausdehnungskoeffizient, der von der Betriebsfrequenz abhängt (für 35 kHz t = 0,17 mm-1). Zu Hause lässt sich am einfachsten ein Horn herstellen, dessen Querschnitt die Form eines Kreises hat. Wenn man weiß, dass die Fläche des Kreises gleich πD2/4 ist, wird der Durchmesser des Horns mit der obigen Formel bei unterschiedlichen Abständen x vom Wandler berechnet (x kann auf 15...20 mm begrenzt werden). Anschließend wird mit den ermittelten Werten ein Längsprofil des Horns auf Papier gezeichnet und daraus eine Schablone aus dickem Karton oder Blech angefertigt. Die Hörner selbst werden mithilfe dieser Hartschaumschablone hergestellt. Die Oberflächen der fertigen Hörner werden mit Farbe beschichtet, um ihnen bessere akustische Eigenschaften zu verleihen. Um sie vor Witterungseinflüssen zu schützen, werden die Hupen in Schutzgehäuse mit Halterungen zur Montage an der Heckstoßstange eines Autos untergebracht. Es ist zweckmäßig, als Gehäuse Kunststoff-Anschlussdosen für elektrische Leitungen zu verwenden. Die Halterungen bestehen aus Stahlblech. Die Zwischenräume zwischen Gehäuse und Horn sind mit Epoxidharz gefüllt und die gesamte Struktur ist mit mehreren Schichten witterungsbeständiger synthetischer Emaille überzogen. Die Einrichtung des Geräts beginnt mit der Überprüfung der Installation auf Zuverlässigkeit der Verbindungen und Abwesenheit von Kurzschlüssen. Vor der Installation des MK empfiehlt es sich, die Funktion des Spannungsstabilisators und des Ultraschallsignalverstärkers zu überprüfen. Schließen Sie dazu den Strom an und messen Sie die Spannung an Pin 5 des MK-Panels. Sie sollte innerhalb von 5 ± 0.3 V liegen. Anschließend die Gleichspannung an Pin 9 des MK-Panels messen (2.5 V ± 10 %) und. durch Anschließen eines Voltmeters an dessen Klemme 10. Stellen Sie die Spannung mit dem Trimmwiderstand R2 auf 0.2...0.3 V mehr als den ersten ein. Anschließend wird der Eingang des Oszilloskops an Pin 9 des MK-Panels angeschlossen und ein Sinussignal mit einer Frequenz von 37 kHz und einer Amplitude von 3 mV an den Verstärkereingang angelegt. Auf dem Bildschirm des Oszilloskops wird ein Signal mit einer Amplitude von 4.5 V beobachtet Durch Anpassen der Induktivität der L1-Spule wird die maximale Verstärkung bei der angegebenen Frequenz erreicht. Anschließend wird bei ausgeschaltetem Gerät ein vorprogrammiertes MK im Panel installiert und das Gerät mit Sender und Empfänger verbunden. Wenn das Gerät beim Einschalten nicht funktioniert, verbinden Sie den Eingang des Oszilloskops (mit einem Eingangswiderstand von mindestens 10 MOhm) mit dem XTAL2-Pin (Pin 6) des DD1-Chips und prüfen Sie, ob der MK-Taktgenerator funktioniert aufgeregt. Das Fehlen von Sinusschwingungen mit einer Frequenz von 8 MHz weist darauf hin, dass der Generator nicht selbsterregend ist. In diesem Fall müssen Sie den Quarzresonator ZQ1 und die Kondensatoren C3 und C4 überprüfen. Bei der Installation in einem Auto wird das Ortungsgerät im Fahrgastraum platziert und die Ultraschallwandler werden in einem Abstand von mindestens 0.6 m voneinander an der hinteren Stoßstange angebracht. Dieser Abstand ergibt die Breite des Arbeitsbereichs des Ortungsgeräts von 2 m. Ändern. Sie können auch die Breite dieser Zone anpassen. Literatur
Autor: M. Gladshtein, M. Sharov
Maschine zum Ausdünnen von Blumen im Garten
02.05.2024 Fortschrittliches Infrarot-Mikroskop
02.05.2024 Luftfalle für Insekten
01.05.2024
▪ Gentechnik für Biokraftstoffe ▪ Intel wird Fernsehern beibringen, Menschen zu erkennen ▪ Sonnenstürme werden zerstörerischer
▪ Abschnitt der Website Ladegeräte, Batterien, Batterien. Artikelauswahl ▪ Artikel Wurfgleiter. Tipps für einen Modellbauer ▪ Artikel Warum schwitzen wir? Ausführliche Antwort ▪ Artikel Schultergurte für einen Rucksack. Reisetipps ▪ Artikel HF-Brücke - Panorama-SWR-Meter. Enzyklopädie der Funkelektronik und Elektrotechnik ▪ Artikel Das einfachste Ladegerät. Enzyklopädie der Funkelektronik und Elektrotechnik
Startseite | Bibliothek | Artikel | Sitemap | Site-Überprüfungen
www.diagramm.com.ua |




 Hinterlasse deinen Kommentar zu diesem Artikel:
Hinterlasse deinen Kommentar zu diesem Artikel: