|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese
ENZYKLOPÄDIE DER FUNKELEKTRONIK UND ELEKTROTECHNIK Proportionale Steuerung des Kühlgebläses des Automotors. Enzyklopädie der Funkelektronik und Elektrotechnik
Lexikon der Funkelektronik und Elektrotechnik / Automobil. Elektronische Geräte Mit dem vorgeschlagenen Gerät können Sie vom Relaisprinzip zur Steuerung des Lüfters des Motorkühlsystems „Temperatur liegt über der Norm – ein, unter der Norm – aus“ auf die Proportionalsteuerung umschalten, was laut Autor günstiger ist für den Motor. Wenn nun die Kühlmitteltemperatur steigt, erhöht sich die Drehzahl des Lüfterrotors linear. Heutzutage wird das Kühlgebläse in vielen Automobilmotoren elektrisch angetrieben, in den meisten Fällen wird es jedoch über ein Relaisprinzip gesteuert. Eine solche Kontrolle hat nur einen Vorteil: die einfache Implementierung. Es genügt ein Temperatursensor mit Kontaktausgang, der den Lüftermotor direkt oder über ein Zwischenrelais steuert. Der Hauptnachteil dieser Methode ist ein starker Abfall der Temperatur des Kühlmittels am Kühlerauslass nach dem Einschalten des Lüfters. Ein mit voller Leistung laufender Lüfter senkt die Temperatur des Kühlmittels am Kühleraustritt um 15 ... 25 оMit oder mehr. Beim Eindringen in den Kühlmantel des Motors verursacht die stark abgekühlte Flüssigkeit an heißen Oberflächen einen Thermoschock, der sich negativ auf den Betrieb des Motors auswirkt. Für einen komfortablen Betrieb ist es wünschenswert, die Temperatur des Kühlmittels nahe dem vom Hersteller empfohlenen Optimum zu halten und plötzliche Temperatursprünge (Thermoschocks) sollten grundsätzlich ausgeschlossen werden. Bei einigen Fahrzeugen mit mechanisch angetriebenem Kühlgebläse wird dies dadurch erreicht, dass das Gebläse über eine Visco-Kupplung mit der Kurbelwelle des Motors verbunden wird. Es verändert das auf die Lüfterwelle übertragene Drehmoment abhängig von der Temperatur des Kühlmittels. Dadurch wird die Temperatur stabilisiert. Das vorgeschlagene Gerät ist ein elektronisches Analogon einer Viskokupplung für einen Ventilator mit Elektroantrieb. Es passt seine Rotationsgeschwindigkeit automatisch an die Temperatur des Kühlmittels an. Das Gerät wird über das Bordnetz des Fahrzeugs mit einer Spannung von 10...18 V betrieben und kann einen Lüfter mit einer maximalen Stromaufnahme von bis zu 20 A oder bis zu 30 A ansteuern, sofern der Kühlkörperbereich vorhanden ist der Leistungselemente wird erhöht. Der Eigenstromverbrauch des Geräts überschreitet einige Milliampere nicht. Die Werte der Lüftereinschalttemperatur bei minimaler Drehzahl und der Temperatur, bei der die Lüfterdrehzahl ihr Maximum erreicht, werden mit einer Auflösung von 0,1 eingestellt оC beim Programmieren des Mikrocontrollers. Fällt der Kühlmitteltemperatursensor aus, geht das Gerät in den Notbetrieb, sodass der Motor sicher zur Reparaturwerkstatt fahren kann. Das Schema des Geräts ist in Abb. dargestellt. 1. Der digitale Sensor DS18B20 (BK1) misst die Temperatur. Die Verwendung dieses Sensors macht eine Kalibrierung des hergestellten Geräts überflüssig und verbessert seine Wiederholbarkeit.
Die Temperaturinformationen werden vom Mikrocontroller ATtiny2313A-PU (DD1) vom Sensor gelesen, der durch 1-MHz-Impulse von einem internen RC-Generator getaktet wird. Es regelt proportional zur Temperatur die Versorgungsspannung des Lüftermotors und damit die Drehzahl seines Rotors. Der Motor erhält eine gepulste Spannung, deren konstante Komponente, die die Drehzahl bestimmt, vom Tastverhältnis (dem Verhältnis der Dauer der Impulse zur Periode ihrer Wiederholung) abhängt. Das Programm stellt den Arbeitszyklus mit XNUMX-Bit-Binärzahlen ein, die in das Vergleichsregister des Mikrocontroller-Timers geladen werden, der im PWM-Modus arbeitet. Die vom Mikrocontroller erzeugten Impulse steuern den Betrieb des Leistungsschalters am Feldeffekttransistor VT1, der den Stromversorgungskreis des Lüftermotors aus dem Bordnetz des Fahrzeugs schließt und öffnet. In diesem Fall ist der konstante Anteil der am Motor anliegenden Spannung gleich U = U0 (N/255) wo U0 - Spannung im Bordnetz, V; N ist die Zahl, die in das Register des Mikrocontrollers geladen wird. Sie kann in Schritten ΔU = U verändert werden0 / 255. Mit einer Spannung im Bordnetz von 12 V ΔU≈0,05 V, wodurch Sie die Lüftergeschwindigkeit nahezu stufenlos regeln können. Um einen zuverlässigen Betrieb des Schlüsseltransistors VT1 im Übergangsmodus zu gewährleisten, steuert der Mikrocontroller ihn über den Treiber TC4420EPA (DA1). Moderne Feldeffekttransistoren verfügen über einen sehr geringen Widerstand im offenen Kanal (einige Milliohm) und sind in der Lage, auch ohne Verwendung eines Kühlkörpers einen erheblichen Strom zu schalten. Allerdings wird die große Eingangskapazität des Feldeffekttransistors, die bei leistungsstarken Geräten mehrere Tausend Picofarad erreicht, beim Schalten geladen und entladen. Dies dauert umso länger, je größer die Ausgangsimpedanz der Steuersignalquelle ist. Das Schlimme ist, dass sich der Feldeffekttransistor beim Aufladen der Kapazität im aktiven Modus befindet und der Widerstand seines Kanals ziemlich hoch ist. Daher wird während der Schaltzeit eine erhebliche Menge an Leistung im Transistorkristall freigesetzt, was zu dessen Überhitzung und irreversiblen Schäden führen kann. Die einzige Möglichkeit, diesem Phänomen entgegenzuwirken, besteht darin, den Ladevorgang zu beschleunigen. Zu diesem Zweck werden Feldeffekttransistoren über spezielle Verstärker (Treiber) gesteuert, die eine niedrige Ausgangsimpedanz haben und einen großen (bis zu mehreren Ampere) gepulsten Lade-/Entladestrom liefern. Dies gewährleistet ein schnelles Aufladen der Eingangskapazität des FET und minimiert somit die Dauer seines Betriebs im aktiven Modus und reduziert die Verlustleistung. Widerstand R4 hält die Eingangslogik des Treibers während des Mikrocontroller-Starts niedrig, solange alle Ausgänge in einem hochohmigen Zustand bleiben. Dadurch wird zu diesem Zeitpunkt ein unnötiges Öffnen des Transistors VT1 vermieden. Die Diode VD1 eliminiert Selbstinduktions-EMF-Impulse, die in den Wicklungen des Lüftermotors beim Schließen des Transistors VT1 auftreten. Während des Betriebs überwacht das Mikrocontrollerprogramm ständig das Vorhandensein und die Funktionsfähigkeit des Temperatursensors. Besteht keine Verbindung dazu, geht es in den Notbetrieb. In diesem Modus wird der Lüfter unabhängig von der Temperatur des Kühlmittels 33 Sekunden lang mit voller Leistung eingeschaltet und dann für die gleiche Zeit ausgeschaltet. Natürlich ist dies bei weitem nicht die beste Art, den Motor zu kühlen, aber es verhindert seinen vollständigen Ausfall ohne Kühlung. Der Übergang in den Notbetrieb wird durch das Einschalten der HL1-LED signalisiert. Wenn der Kommunikationsausfall mit dem Sensor vorübergehend war, wechselt das Gerät nach seiner Wiederherstellung in den Normalbetrieb. Das Mikrocontroller-Programm zur Lüftersteuerung enthält als Konstanten folgende Ausgangsdaten: - TMin. = 87 - Kühlmitteltemperatur, оC, bei dem der Lüfter mit der Mindestgeschwindigkeit zu arbeiten beginnen sollte; Wie Sie wissen, verfügen Industriesensoren zur Steuerung des Betriebs von Kühlventilatoren über zwei Hauptparameter: die Einschalttemperatur und die Ausschalttemperatur. Sie sollten als T gewählt werdenmax und TMin.. Der Wert von N1 muss so eingestellt werden, dass der konstante Anteil der Spannung am Lüftermotor gleich seiner Anlaufspannung U isttr. Das Problem besteht darin, dass es nicht üblich ist, in den technischen Daten von Ventilatoren die Abschaltspannung anzugeben, sodass der Autor den Wert dieses Parameters weder in der Literatur noch in der Dokumentation finden konnte. Es musste experimentell ermittelt werden. Die Technik ist einfach: Durch Anlegen einer Spannung an den Motor ermitteln Sie den Wert, bei dem sich die Welle langsam zu drehen beginnt (in ein oder zwei Sekunden), sich aber gleichmäßig dreht. Bei den meisten Gleichstrommotoren mit einer Nennversorgungsspannung von 12 V liegt die Anzugsspannung im Bereich von 3...5 V. Beim Start des Programms wird der Mikrocontroller, basierend auf den Werten von TmaxTMin. und N1 berechnet Dn - die erforderliche Steilheit der Abhängigkeit des Wertes des geladenen Code-Timer-Vergleichsregisters von der Temperatur: Dn = (255 - N1)/(Tmax - TMin.). Dann beginnt die Hauptschleife des Programms. Zunächst erfolgt eine Überprüfung der Kommunikation mit dem Temperatursensor und bei dessen Fehlen der Übergang in den Notbetrieb. Eine solche Prüfung führt das Programm jede Sekunde durch. Ergibt die nächste Überprüfung, dass der Sensor funktioniert, wird der Normalbetrieb wiederhergestellt. Wenn der Sensor in Ordnung ist, misst er die aktuelle Kühlmitteltemperatur T. Wenn sie unter T liegtMin., schaltet das Programm den Lüfter aus, andernfalls berechnet es den erforderlichen Wert des Steuercodes anhand der Formel N = (T - TMin.) Dn+N1. Im Verhältnis dazu wird das Tastverhältnis der den Motor versorgenden Spannung und damit die Drehzahl seines Rotors eingestellt. Dadurch wird die Temperatur des Kühlmittels bei konstanter Belastung des Motors konstant gehalten. Bei variabler Belastung schwankt die Temperatur innerhalb kleiner Grenzen innerhalb des Intervalls TMin....Tmax. Alle Teile des Geräts, mit Ausnahme des BK1-Sensors und der HL1-LED, sind auf einer 58x65 mm großen Leiterplatte platziert, deren Zeichnung in Abb. 2 dargestellt ist. 3 und die Anordnung der Elemente - in Abb. XNUMX.
Mikroschaltungen werden ohne Platten direkt auf die Platine gelötet, deren Verwendung bei starken Vibrationen unerwünscht ist. Die Platine verfügt über in der Abbildung nicht dargestellte Kontaktpads SCK, RST, VCC, MISO, MOSI, GND, an die bei der Programmierung des Mikrocontrollers die gleichnamigen Drähte des Programmierers angelötet werden. In diesem Fall sollten die Platine und das Programmiergerät während der Programmierung mit +5 V (VCC) aus derselben Quelle versorgt werden. Die Platine ist für die Aufnahme von Widerständen und Kondensatoren der Größe 1206 zur Oberflächenmontage ausgelegt. Diode SR2040 (URL: files.rct.ru/pdf/diode/5261755198365.pdf) – in einem zweipoligen TO220AC-Gehäuse. Zusammen mit dem IRF3808-Transistor wird er mittels Wärmeleitpaste auf einem gemeinsamen Kühlkörper mit einer Kühlfläche von ca. 60 cm befestigt2. Das Prinzip der Befestigung eines Transistors 5 oder einer Diode an einem Kühlkörper 1 und der gesamten Baugruppe an einer Leiterplatte 2 ist in Abb. dargestellt. 4. Die Diode ist mit einer Glimmerdichtung vom Kühlkörper und mit einer Isolierhülse von der Befestigungsschraube 4 und der Metallhülse 3 isoliert (Isolierelemente sind in der Abbildung nicht dargestellt). Zwischen den Gehäusen der Diode und des Transistors befindet sich der dritte Befestigungspunkt des Kühlkörpers an der Platine. Auch hier erfolgt die Fixierung mit einer Schraube und einer Hülse.
Alle Leiterbahnen der Platine, durch die der Strom des Lüftermotors fließt, müssen mit einer Lotschicht von mindestens 0,7 ... 1 mm Dicke bedeckt sein und der Querschnitt der Versorgungsdrähte muss den Durchgang gewährleisten dieses Stroms. Es empfiehlt sich, die HL1-LED im Fahrzeuginnenraum zu platzieren, damit der Fahrer aktuelle Informationen über die aktuelle Betriebsart des Geräts erhält. Der Sensor DS18B20 (VK1) sollte im Gehäuse des serienmäßigen Kühlmitteltemperatur-Kontaktsensors untergebracht werden, von dem zunächst alle „Füllungen“ entfernt werden müssen. Ein solcher Körper kann unter Beibehaltung der Gesamt- und Anschlussmaße auch aus Messing gefertigt werden. Die Platzierung des DS18B20-Sensors im Gehäuse ist in Abb. dargestellt. 5. Der Sensor 4 mit dem an seinen Anschlüssen angelöteten Stecker 1 wird im Gehäusehohlraum 3 so platziert, dass seine Oberseite, auf die eine Schicht Wärmeleitpaste 5 aufgetragen ist, den Boden des Hohlraums berührt.
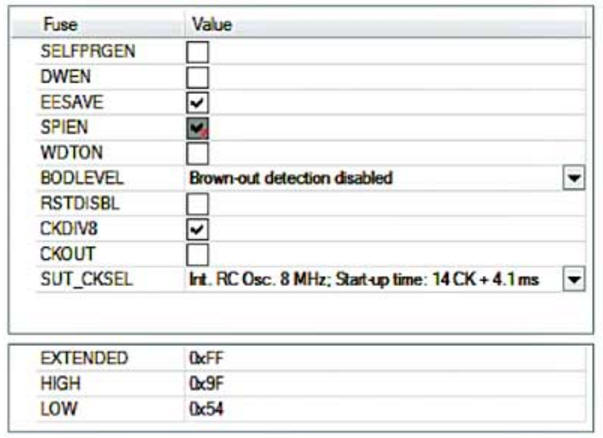
Danach wird der Hohlraum mit einem hitzebeständigen Dichtmittel gefüllt. Stecker 1 muss über eine Korrosionsschutzbeschichtung der Kontakte verfügen, spritzwassergeschützt sein, das Gegenstück sicher fixieren und ein Lösen durch Vibrationen verhindern. Der vorbereitete Sensor wird anstelle des regulären Sensors installiert. Die zusammengebaute Platine wird in einen Koffer geeigneter Größe gelegt, der sich im Motorraum des Autos befindet. Im Gehäuse sind Belüftungsöffnungen vorhanden. Der Mikrocontroller ATtiny2313A kann durch eine andere AVR-Familie ersetzt werden, die über mindestens einen 8-Bit- und einen 16-Bit-Timer sowie mindestens 2 KB Programmspeicher verfügt. Natürlich erfordert der Austausch des Mikrocontrollers eine Neukompilierung des Programms und möglicherweise eine Änderung des Layouts der Leiterplatte. Anstelle des nicht invertierenden Low-Side-Treibers TC4420EPA können Sie einen anderen ähnlichen Treiber verwenden, beispielsweise den MAX4420EPA. Die Schottky-Diode SR2040 kann durch eine gleichartige ersetzt werden, die eine zulässige Sperrspannung von mindestens 25 V und einen zulässigen Durchlassstrom von mindestens dem Betriebsstrom des Lüfters aufweist. Allerdings sind Schottky-Dioden mit einer Sperrspannung von mehr als 40 V nicht zu empfehlen, da ein größerer Durchlassspannungsabfall an einer solchen Diode zu einer Erhöhung der Wärmeableitung führt. Als Ersatz für den IRF3808-Feldeffekttransistor mit isoliertem Gate und n-Typ-Kanal sollte ein akzeptabler direkter Drainstrom bei einer Temperatur von 100 °C (2,5 ... 3-facher Lüfterbetriebsstrom) und ein offener Kanalwiderstand ausgewählt werden bei einem Lüfterbetriebsstrom bis 20 A - nicht mehr als 10 mΩ und 20 ... 30 A - nicht mehr als 7 mΩ. Die zulässige Drain-Source-Spannung muss mindestens 25 V und die Gate-Source-Spannung mindestens 20 V betragen. Ein korrekt aus gebrauchsfähigen Teilen zusammengebautes Gerät muss nur dann angepasst werden, wenn die Anfangsdaten in der zuvor erwähnten beigefügten Programmversion nicht mit den erforderlichen übereinstimmen. In diesem Fall müssen sie im Quellcode des Programms korrigiert, in der Bascom AVR-Entwicklungsumgebung neu kompiliert und anstelle der dem Artikel beigefügten Cooler-test.hex-Datei, der resultierenden HEX-Datei, in den Speicher des Mikrocontrollers geladen werden. Ist die Anlaufspannung des Lüftermotors unbekannt, kann diese experimentell ermittelt werden. Dazu müssen Sie anstelle des Arbeitsprogramms das von mir entwickelte Debug-Programm in den Speicher des Mikrocontrollers laden. Die dem Artikel beigefügte Datei Cooler-test.hex enthält die Codes. Die Programmierung der Mikrocontroller-Konfiguration erfolgt in gleicher Weise für die Arbeits- und Testprogramme gemäß Abb. 6, das das Setup-Fenster für die Konfiguration des AVRISP mkII-Programmierers zeigt.
3 s nach dem Einschalten der Stromversorgung beginnt das Cooler-Test-Programm mit der Steuerung des Lüfters und erhöht den Code, der den Arbeitszyklus der den Lüfter versorgenden Impulsspannung festlegt, schrittweise von 55 auf 95 Schritte zu je 5 Einheiten. Dies entspricht in etwa einer Änderung des Gleichstromanteils dieser Spannung von drei auf fünf Volt. Die Dauer jeder Stufe beträgt 10 s, während der der Lüfter und die HL1-LED eingeschaltet sind, und eine Pause von 5 s, während der der Lüfter stromlos ist und die LED aus ist. Das Programmende wird durch fünfmaliges kurzes Blinken der LED signalisiert. Durch Beobachtung der LED lässt sich leicht feststellen, in welcher Phase sich der Lüfter zu drehen begann, und den Wert von N1 bestimmen, der in das Hauptprogramm geschrieben werden sollte. Der Betrieb des Gerätes im Notbetrieb wird durch Abziehen des Steckers vom Temperatursensor überprüft. In diesem Fall sollte sich der Lüfter einschalten und im intermittierenden Modus (33 s - Betrieb, 33 s - Pause) mit voller Leistung laufen. LED HL1 sollte leuchten. Die gewünschte Helligkeit wird durch Auswahl des Widerstands R3 eingestellt. Die Mikrocontroller-Programme können unter ftp://ftp.radio.ru/pub/2016/11/fan.zip heruntergeladen werden. Autor: A. Savchenko, pos. Zelenogradsky, Gebiet Moskau
Maschine zum Ausdünnen von Blumen im Garten
02.05.2024 Fortschrittliches Infrarot-Mikroskop
02.05.2024 Luftfalle für Insekten
01.05.2024
▪ Edifier TWS1 Air kabellose Kopfhörer ▪ Wiederherstellung des Sehvermögens mit drahtlosen Implantaten ▪ Radiosendungen auf Bestellung ▪ Nicht bitterer Chicorée gezüchtet ▪ Netzwerke aus Nanoröhren weben
▪ Abschnitt der Website, Spionagematerial. Artikelauswahl ▪ Artikel Positives Denken. Populärer Ausdruck ▪ Artikel Bewegung in den Bergen. Reisetipps ▪ Artikel Impulsvoltmeter. Enzyklopädie der Funkelektronik und Elektrotechnik
Kommentare zum Artikel: viktor Bei einem Kurzschluss schaltet es sich nicht aus - die Verkabelung brennt durch. funktioniert unter leichter Belastung. Leonid Verstehe nicht, worum es geht? Der Thyristor kann die Masse tatsächlich ein- und ausschalten. Aber wenn Sie die Diode installieren, ist es die Masse, sie bleibt eingeschaltet. und damit dies funktioniert, müssen Sie ein Relais hinzufügen, das eine Diode mit dem System verbindet und Spannung an die Steuerelektrode anlegt. Vielleicht verstehe ich etwas nicht, wer gebildeter ist - erkläre es Gast Leonid! Die Diode lässt Strom in eine Richtung durch, d.h. vom Generator bis zur Batterie.
Startseite | Bibliothek | Artikel | Sitemap | Site-Überprüfungen
www.diagramm.com.ua |






 Hinterlasse deinen Kommentar zu diesem Artikel:
Hinterlasse deinen Kommentar zu diesem Artikel: