Steuerbus I2C. Enzyklopädie der Funkelektronik und Elektrotechnik

Lexikon der Funkelektronik und Elektrotechnik / Computer
 Kommentare zum Artikel
Kommentare zum Artikel
I2C ist eine von Philips entwickelte Zweidrahtschnittstelle. Die ursprüngliche Spezifikation für die Schnittstelle hatte eine maximale Datenrate von 100 Kbps. Im Laufe der Zeit sind jedoch Standards für schnellere Betriebsmodi entstanden I2C. Auf einen Reifen I2C können Geräte mit unterschiedlichen Zugriffsraten angeschlossen werden, da die Datenrate durch das Taktsignal bestimmt wird.
Das Datenübertragungsprotokoll ist so ausgelegt, dass ein zuverlässiger Empfang der übertragenen Daten gewährleistet ist.
Bei der Datenübertragung fungiert ein Gerät als „Master“, der die Datenübertragung initiiert und Synchronisationssignale generiert. Ein anderes Gerät „Slave“ – beginnt mit der Übertragung nur auf einen Befehl vom „Master“.
Die PIC16CXXX-Mikrocontroller implementieren den „Slave“-Modus des Geräts im SSP-Modul in Hardware. Der „Master“-Modus ist softwaremäßig implementiert.
Grundbegriffe zur Beschreibung des Busbetriebs I2C:
Sender - ein Gerät, das Daten auf einem Bus überträgt
Empfänger - ein Gerät, das Daten vom Bus empfängt
"Meister" - ein Gerät, das die Übertragung initiiert und ein Taktsignal erzeugt
"Sklave" - das Gerät, auf das der „Master“ zugreift
Multi "Meister" - Busmodus I2C mit mehr als einem „Master“
Schiedsgerichtsbarkeit - ein Verfahren, um sicherzustellen, dass nur ein "Master" den Bus steuert
Synchronisation - Verfahren zum Synchronisieren des Taktsignals von zwei oder mehr Geräten
Die Ausgangsstufen der Synchronisationssignal- (SCL) und Datengeneratoren (SDA) müssen gemäß Open-Collector-Schaltungen (Drain) ausgeführt werden, um mehrere Ausgänge zu kombinieren, und über einen externen Widerstand mit dem positiven Netzteil verbunden werden, damit der Buspegel „ 1“, wenn keines der Geräte ein „0“-Signal erzeugt. Die maximale kapazitive Last ist auf 400 pF Kapazität begrenzt.
Initialisierung und Abschluss der Datenübertragung
Wenn auf dem Bus keine Datenübertragung stattfindet, sind die SCL- und SDA-Signale aufgrund eines externen Widerstands hoch.
Die START- und STOP-Signale werden vom "Master" generiert, um den Beginn bzw. das Ende der Datenübertragung festzulegen.
Das START-Signal wird durch einen Hoch-zu-Niedrig-Übergang des SDA-Signals erzeugt, während das SCL-Signal hoch ist. Das STOP-Signal ist als SDA-Übergang von niedrig nach hoch definiert, wenn SCL hoch ist. Somit kann sich das SDA-Signal beim Übertragen von Daten nur ändern, wenn das SCL-Signal niedrig ist.

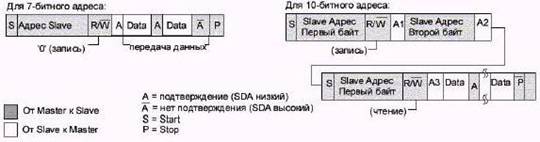
Geräteadressierung auf Bus I2C
Zur Adressierung von Geräten werden zwei Adressformate verwendet:
Einfaches 7-Bit-Format mit R/W-Lese-/Schreibbit;

und 10-Bit-Format - im ersten Byte werden die beiden höchstwertigen Bits der Adresse und das Schreib-/Lesebit übertragen, im zweiten Byte wird der untere Teil der Adresse übertragen.

Abnahmebestätigung
Beim Senden von Daten muss der Empfänger nach jedem gesendeten Byte den Empfang des Bytes mit einem ACK-Signal bestätigen.
Quittiert der „Slave“ den Empfang der Adresse oder des Datenbytes nicht, muss der „Master“ die Übertragung durch Erzeugen eines STOP-Signals unterbrechen.
Bei der Übertragung von Daten vom „Slave“ zum „Master“ generiert „Master“ ACK-Datenbestätigungssignale. Wenn der „Master“ den Empfang des Bytes nicht bestätigt, stoppt der „Slave“ die Datenübertragung, indem er die SDA-Leitung „freigibt“. Danach kann der „Master“ ein STOP-Signal generieren.
Um die Datenübertragung zu verzögern, kann der „Slave“ eine logische Null setzen, die dem „Master“ anzeigt, dass er warten soll. Nach Freigabe der SCL-Leitung wird die Datenübertragung fortgesetzt.


Datenübertragung vom „Master“ zum „Slave“

Daten von „Slave“ lesen
Mit dem Re-START-Signal auf den „Slave“ zugreifen

Multi-Master-Modus
Kommunikationsprotokoll I2C ermöglicht Ihnen, mehr als einen „Master“ am Bus zu haben. Arbitrations- und Synchronisationsfunktionen werden verwendet, um Buskonflikte während der Übertragungsinitialisierung zu lösen.
Schiedsgerichtsbarkeit
Die Arbitrierung wird auf der SDA-Leitung durchgeführt, wenn die SCL-Leitung hoch ist. Ein Gerät, das auf der SDA-Leitung einen High-Pegel erzeugt, während ein anderes Low sendet, verliert das Recht, den „Master“ zu übernehmen, und muss in den „Slave“-Modus wechseln. Ein „Master“, der die Initiative am Bus verloren hat, kann bis zum Ende des Bytes, in dem er seine Mastereigenschaften verloren hat, Taktimpulse erzeugen.

Synchronisation
Der Takt auf dem Bus tritt auf, nachdem eine Arbitrierung am SCL-Signal durchgeführt wurde. Wenn das SCL-Signal von High auf Low geht, beginnen alle interessierten Geräte, die Dauer des Low-Pegels zu zählen. Die Geräte beginnen dann, den SCL entsprechend der erforderlichen Datenrate von niedrig auf hoch umzustellen. Nachdem die Pegelübergänge von niedrig nach hoch sind, zählen interessierte Geräte die Dauer des hohen Pegels. Das erste Gerät, das das SCL-Signal auf Low zieht, bestimmt die Taktparameter.

Veröffentlichung: cxem.net
 Siehe andere Artikel Abschnitt Computer.
Siehe andere Artikel Abschnitt Computer.
Lesen und Schreiben nützlich Kommentare zu diesem Artikel.
<< Zurück
 Neueste Nachrichten aus Wissenschaft und Technik, neue Elektronik:
Neueste Nachrichten aus Wissenschaft und Technik, neue Elektronik:
Kunstleder zur Touch-Emulation
15.04.2024
In einer modernen Technologiewelt, in der Distanz immer alltäglicher wird, ist es wichtig, die Verbindung und das Gefühl der Nähe aufrechtzuerhalten. Jüngste Entwicklungen bei künstlicher Haut durch deutsche Wissenschaftler der Universität des Saarlandes läuten eine neue Ära der virtuellen Interaktionen ein. Deutsche Forscher der Universität des Saarlandes haben ultradünne Folien entwickelt, die das Tastgefühl über eine Distanz übertragen können. Diese Spitzentechnologie bietet neue Möglichkeiten der virtuellen Kommunikation, insbesondere für diejenigen, die weit von ihren Lieben entfernt sind. Die von den Forschern entwickelten ultradünnen, nur 50 Mikrometer dicken Folien lassen sich in Textilien integrieren und wie eine zweite Haut tragen. Diese Folien fungieren als Sensoren, die taktile Signale von Mama oder Papa erkennen, und als Aktoren, die diese Bewegungen an das Baby weiterleiten. Durch die Berührung des Stoffes durch die Eltern werden Sensoren aktiviert, die auf Druck reagieren und den ultradünnen Film verformen. Das ... >>
Petgugu Global Katzenstreu
15.04.2024
Die Pflege von Haustieren kann oft eine Herausforderung sein, insbesondere wenn es darum geht, Ihr Zuhause sauber zu halten. Das Startup Petgugu Global hat eine neue interessante Lösung vorgestellt, die Katzenbesitzern das Leben erleichtert und ihnen hilft, ihr Zuhause perfekt sauber und ordentlich zu halten. Das Startup Petgugu Global hat eine einzigartige Katzentoilette vorgestellt, die den Kot automatisch ausspülen kann und so Ihr Zuhause sauber und frisch hält. Dieses innovative Gerät ist mit verschiedenen intelligenten Sensoren ausgestattet, die die Toilettenaktivität Ihres Haustieres überwachen und nach dem Gebrauch eine automatische Reinigung aktivieren. Das Gerät wird an die Kanalisation angeschlossen und sorgt für eine effiziente Abfallentsorgung, ohne dass der Eigentümer eingreifen muss. Darüber hinaus verfügt die Toilette über einen großen spülbaren Stauraum, was sie ideal für Haushalte mit mehreren Katzen macht. Die Petgugu-Katzentoilettenschüssel ist für die Verwendung mit wasserlöslicher Streu konzipiert und bietet eine Reihe zusätzlicher ... >>
Die Attraktivität fürsorglicher Männer
14.04.2024
Das Klischee, dass Frauen „böse Jungs“ bevorzugen, ist schon lange weit verbreitet. Jüngste Untersuchungen britischer Wissenschaftler der Monash University bieten jedoch eine neue Perspektive zu diesem Thema. Sie untersuchten, wie Frauen auf die emotionale Verantwortung und Hilfsbereitschaft von Männern reagierten. Die Ergebnisse der Studie könnten unser Verständnis darüber verändern, was Männer für Frauen attraktiv macht. Eine von Wissenschaftlern der Monash University durchgeführte Studie führt zu neuen Erkenntnissen über die Attraktivität von Männern für Frauen. Im Experiment wurden Frauen Fotos von Männern mit kurzen Geschichten über deren Verhalten in verschiedenen Situationen gezeigt, darunter auch über ihre Reaktion auf eine Begegnung mit einem Obdachlosen. Einige der Männer ignorierten den Obdachlosen, während andere ihm halfen, indem sie ihm beispielsweise Essen kauften. Eine Studie ergab, dass Männer, die Empathie und Freundlichkeit zeigten, für Frauen attraktiver waren als Männer, die Empathie und Freundlichkeit zeigten. ... >>
| Zufällige Neuigkeiten aus dem Archiv Spin-Speicherzelle aus Platinkäfig
25.11.2013
Physikern ist es gelungen, eine relativ stabile Spin-Speicherzelle zu schaffen, indem sie ein Holmiumatom in einen speziellen "Käfig" aus Platinatomen platziert haben, der es von der Außenwelt isoliert und es ermöglicht, den Spinzustand des Elektrons für mehr als 6 Minuten aufrechtzuerhalten zu einem Artikel in der Zeitschrift Nature.
In den letzten Jahrzehnten haben Physiker aktiv die Quanteneigenschaften von Elektronen und Atomen untersucht und versucht, sie für die Herstellung elektronischer Geräte anzupassen. In der konventionellen Mikroelektronik werden Informationen durch eine elektrische Ladung dargestellt. In der Spinelektronik oder Spintronik werden Informationen durch den Spin eines Elektrons dargestellt – die Rotationsrichtung eines Teilchens.
Wulf Wulfhekel vom Institut für Technologie in Karlsruhe (Deutschland) und seine Kollegen haben einen großen Schritt in Richtung der Entwicklung solcher Geräte gemacht, nachdem sie gelernt haben, den Spin eines Elektrons für eine lange Zeit zu stabilisieren, hundertmal höher als frühere Rekorde. Die wichtigste Entdeckung der Autoren des Artikels war die Schaffung einer speziellen "Zelle" aus Platinatomen, die in sich selbst eine "tote Zone" erzeugt.
Dieses Design ist eine mikroskopische Platte, in der die Platinatome zu gleichseitigen "Dreiecken" kombiniert sind. In der Mitte eines dieser Dreiecke platzierten die Wissenschaftler ein Holmiumatom, ein Seltenerdmetall aus der Lanthanidenreihe, das ungewöhnliche magnetische und Quanteneigenschaften aufweist.
Durch das Vorhandensein eines „Käfigs“ sind die Elektronen in den äußeren Schalen von Holmium vor Störungen und Umwelteinflüssen geschützt. Als Wissenschaftler versuchten, den Zustand des Spins in einer solchen „Gedächtniszelle“ aufzuzeichnen und auszulesen, stellten sie fest, dass dieser sechs Minuten lang stabil bleibt, was bis heute ein absoluter Rekord ist.
Darüber hinaus kann dieses Gerät nach Berechnungen von Physikern im Gegensatz zu anderen Beispielen der Spintronik bei relativ hohen Temperaturen von bis zu minus 173 Grad Celsius betrieben werden. Wie die Autoren des Artikels glauben, weist ihre Idee auf die Möglichkeit hin, Hochtemperatur-Spintronik zu entwickeln und für praktische Zwecke zu nutzen.
|
Weitere interessante Neuigkeiten:
▪ Erweiterte Blutgefäße
▪ Latex-Gold
▪ Fliegen sind ansteckender als gedacht
▪ Sensoren zum Schutz von American-Football-Spielern
▪ DC/DC-Boost-LED-Treiber Mean Well LDH-25/65
News-Feed von Wissenschaft und Technologie, neue Elektronik
 Interessante Materialien der Freien Technischen Bibliothek:
Interessante Materialien der Freien Technischen Bibliothek:
▪ Abschnitt der Website „Elektrikerhandbuch“. Artikelauswahl
▪ Artikel Huhn in Suppe. Populärer Ausdruck
▪ Artikel Warum hat die Polizei seit 40 aufgehört, nach einem Mörder zu suchen, der 1993 Verbrechen verdächtigt wurde? Ausführliche Antwort
▪ Artikel Eberesche gewöhnlich. Legenden, Kultivierung, Anwendungsmethoden
▪ Artikel Ejektorkraftwerk. Enzyklopädie der Funkelektronik und Elektrotechnik
▪ Artikel Das PIPE-Programm hilft bei der Herstellung von Leiterplatten. Enzyklopädie der Funkelektronik und Elektrotechnik
Hinterlasse deinen Kommentar zu diesem Artikel:
 Alle Sprachen dieser Seite
Alle Sprachen dieser Seite
Startseite | Bibliothek | Artikel | Sitemap | Site-Überprüfungen

www.diagramm.com.ua
2000-2024






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese