|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese
ENZYKLOPÄDIE DER FUNKELEKTRONIK UND ELEKTROTECHNIK Bordcomputer für Elektrofahrräder. Enzyklopädie der Funkelektronik und Elektrotechnik
Lexikon der Funkelektronik und Elektrotechnik / Haus, Haushalt, Hobby Wir stellen unseren Lesern einen Bordcomputer vor, der auf einem PIC16F876A-Mikrocontroller mit einem externen Stromsensor basiert und für ein Elektrofahrrad entwickelt wurde. Auf seinem Display zeigt es sowohl die Fahrparameter als auch die daraus entnommene Batteriespannung, den Strom, die Leistung und den Energieverbrauch an. Das Gerät basiert auf einer zugänglichen Elementbasis und ist leicht zu reproduzieren. Zur Überwachung der Betriebsweise von Elektrofahrrädern werden verschiedene Messgeräte eingesetzt. Elektrische Parameter werden von Leistungsanalysatoren gemessen [1, 2], Bewegungsparameter werden von verschiedenen elektronischen Fahrradcomputern [3] und sogar mechanischen Geschwindigkeitsmessern [4] überwacht. Es gibt sogar spezielle Displays für Elektrofahrräder [5], die alle notwendigen Parameter anzeigen, aber hohe Kosten verursachen. Darauf aufbauend habe ich einen Bordcomputer für ein Elektrofahrrad auf einem PIC16F876A-Mikrocontroller mit externem Stromsensor entwickelt. Wichtigste technische Merkmale
Die Anzeigeauflösung des entsprechenden Parameters wird in Klammern angegeben. Der Bordcomputer zeigt die aktuelle Uhrzeit in 1-Minuten-Schritten an. Das Bordcomputerdiagramm ist in Abb. dargestellt. 1. Der Mikrocontroller DD2 (PIC16F876A-I/P) arbeitet mit einem Oszillator, der durch einen ZQ2-Quarzresonator mit einer Frequenz von 8 MHz stabilisiert wird. Für die Programmierung des Mikrocontrollers steht der Connector XP1 zur Verfügung. Ich habe den PICkit2-Programmierer daran angeschlossen. Das Mikrocontrollerprogramm wurde in der grafischen Umgebung Flowcode [6] entwickelt.
Spannungs- und Strommessungen werden mit dem internen 10-Bit-ADC des Mikrocontrollers durchgeführt. Bei der Spannungsmessung wird das Signal vom Spannungsteiler R5R9R12 an den Analogeingang AN0 (RA0) des Mikrocontrollers gesendet. Bei der Strommessung der Spannungsabfall am Stromsensor Rш verstärkt den Operationsverstärker OPA241 (DA1). Vom Ausgang des Operationsverstärkers gelangt das verstärkte Signal zum Analogeingang AN1 (RA1) des Mikrocontrollers. Die Verstärkung wird durch Trimmen des Widerstands R13 im Rückkopplungskreis des Operationsverstärkers eingestellt. Anstelle von OPA241 kann fast jeder einzelne Rail-to-Rail-Operationsverstärker in einem SO-8-Gehäuse verwendet werden, beispielsweise OPA340 oder TS507. Das Programm berechnet Strom und Stromverbrauch anhand der gemessenen Strom- und Spannungswerte. Als Fernstromsensor wurde ein Standard-Messshunt 75SHISV.2-0.5-15 mit einem Spannungsabfall von 75 mV bei einem Strom von 15 A verwendet. Als Ersatz können Sie jeden Standard-Shunt mit einem Widerstand von 5... verwenden. 10 mOhm oder ein ähnliches selbstgemachtes [7]. Der Bordcomputer wird von einem linearen Spannungsregler gespeist, der aus dem Regeltransistor VT1 und der Mikroschaltung TL431ID (DA2) besteht. Im Stromkreis ist eine VD1R10C6C7-Schaltung verbaut, die die Störungen durch einen laufenden Elektromotor reduziert. Die Widerstände R16 und R17 sorgen für eine gleichmäßige Spannungsverteilung zwischen den Kondensatoren C6 und C7. Die maximal zulässige Eingangsspannung (Batteriespannung) hängt von der zulässigen Kollektor-Emitter-Spannung des Transistors VT1, seiner zulässigen Verlustleistung, der Qualität der Wärmeableitung und der an den Widerständen R19-R22 abgegebenen Leistung ab. Mit den im Diagramm angegebenen Stabilisatorelementen sollte die Batteriespannung 75 V nicht überschreiten. Das Gerät ist jedoch in der Lage, Werte bis 102,3 V auf der Anzeige anzuzeigen. Der Bordcomputer ist auf einer einseitigen Leiterplatte aus 1,5 mm dickem Fiberglas gefertigt. Eine Zeichnung der Leiterplattenleiter und der Anordnung der Elemente darauf ist in Abb. dargestellt. 2 und Abb. 3. In Abb. 4 zeigt sein Aussehen.
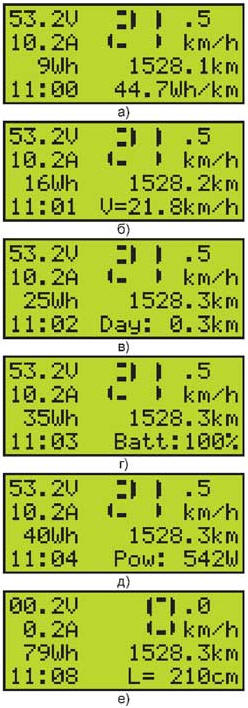
Auf der Vorderseite der Platine befinden sich ein PIC16F876A-Mikrocontroller, ein ZQ2-Quarzresonator, ein DS1307-Echtzeituhrchip, Abstimmwiderstände, ein VT1-Transistor, ein XP1-Anschluss (Winkelstiftblock PLS-5R) und ein PLS-14-Block zum Anschluss des HG1-Indikators. Der passende Teil des Steckverbinders, der PBS-1-Buchsenblock, wird in die Montagelöcher der HG14-Anzeige eingelötet. In der Halterung BH-1 ist eine 2032V G3 CR642 Lithiumbatterie verbaut. Alle anderen Elemente werden seitlich an den Leiterbahnen montiert. In die Löcher auf der Seite der Leiterbahnen neben den Pins 1 und 32768 der Mikroschaltung DD1 ist ein zylindrischer Quarzresonator ZQ2 (1 Hz) eingelötet. Der obere Teil seines Körpers ist mit einem Folienabschnitt verlötet, der mit einem gemeinsamen Draht verbunden ist. Die Bordcomputerplatine wird auf zwei 10...12 mm hohen Metallständern mit M3-Schrauben an der LCD-Platine befestigt. Zum Einsatz kommen Widerstände und Kondensatoren der Standardgröße 120b zur Aufputzmontage. Die Kondensatoren C6 und C7 bestehen aus Tantaloxid zur Oberflächenmontage in der Baugröße E. Sie können durch andere Kondensatoren der gleichen Größe mit einer Kapazität von 6,8...22 μF für eine Spannung von 35 V ersetzt werden. Die übrigen Kondensatoren haben Keramikgröße 1206 oder 0805. Ein Ersatz für den NPN-Transistor BD139 in einem Spannungsstabilisator kann ein anderer Transistor gleicher Struktur im TO-126-Gehäuse mit einer zulässigen Kollektor-Emitter-Spannung von mehr als 80 V sein, zum Beispiel BD179, MJE182 2N5192, BF469, KT817G. Unter das Transistorgehäuse wird ein Streifen aus dünnem Kupfer- oder Aluminiumblech mit einer Fläche von ca. 6 cm gelegt.2, dient als Kühlkörper. Der Transistor wird mit einer M3-Schraube und Mutter an der Platine befestigt. Zur Reduzierung des Messfehlers Shunt Rш, sollte möglichst nahe am Minuspol der Batterie liegen. Alle Verbindungen zum Bordcomputer können mit Kabeln mit kleinem Querschnitt hergestellt werden. Um den Reed-Schalter SF1 (Wegsensor) anzuschließen, verbinden Sie R mit dem Bordcomputerшund der Batterie GB1 wird ein im Diagramm nicht dargestellter PC7TV-Anschluss verwendet, der am Bordcomputergehäuse installiert ist. Der Reed-Schalter stammt von einem defekten elektronischen Fahrradcomputer. Die Parameter im Bordcomputer werden auf einem vierzeiligen LCD WH1604A mit einer Versorgungsspannung von 5 V ohne Hintergrundbeleuchtung angezeigt. Sein Fehlen erklärt sich aus dem hohen Stromverbrauch der Hintergrundbeleuchtung (220 mA), der zu einer Überhitzung des Transistors VT1 führen würde. Ab dem Einschalten des Bordcomputers werden sieben Parameter gleichzeitig auf dem LCD angezeigt: Spannung, Strom, verbrauchte Strommenge, aktuelle Uhrzeit, Geschwindigkeit, Gesamtkilometerstand und spezifischer elektrischer Energieverbrauch (siehe Abb. 4). Der Geschwindigkeitswert wird pseudografisch auf dem Bildschirm angezeigt. Dadurch war es möglich, die Ziffernhöhe auf zwei Zeilen zu bringen, was das Ablesen der Geschwindigkeit auf dem Bildschirm deutlich erleichterte. Die Steuerung des Bordcomputers erfolgt über die Tasten SB1 „M“ (Minuten einstellen), SB2 „H“ (Stunden einstellen) und SB3 „P“ (Anzeigemodus). Durch sukzessives Drücken der SB3-Taste in der unteren rechten Ecke des Bildschirms werden anstelle des spezifischen Verbrauchs an elektrischer Energie (Abb. 5,a) die Durchschnittsgeschwindigkeit (Abb. 5,b) und die tägliche Kilometerleistung (Abb. 5,c) angezeigt ), Batterieladung (Abb. 5,d) oder die vom Elektromotor aufgenommene Leistung (Abb. 5,d).
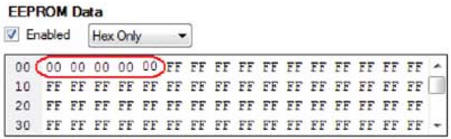
Wenn Sie die Taste SB3 länger als 5 s gedrückt halten, wechselt das Programm in den Modus zum Einstellen des Radumfangs (Abb. 5, e). Durch weiteres Halten dieser Taste verändert sich der Radumfang in 1-cm-Schritten von 201 bis 215 cm (26-Zoll-Rad). Beim ersten Einschalten des Gerätes ist der Radumfang auf 210 cm eingestellt. 5 s nach dem Loslassen der SB3-Taste wird der Radumfang-Einstellmodus verlassen und der eingestellte Wert in das EEPROM des Mikrocontrollers geschrieben. Beim Programmieren des Mikrocontrollers ist es notwendig, Nullen in die ersten fünf EEPROM-Zellen zu schreiben (Abb. 6), um den Anfangswert der zurückgelegten Strecke auf Null zu setzen. Geschieht dies nicht, beträgt die Laufleistung 1525,7 km.
Das Programm speichert die zurückgelegte Strecke 3 Sekunden nach dem Stoppen des Elektrofahrrads im EEPROM des Mikrocontrollers. Um den Aufnahmezeitpunkt anzuzeigen, erscheint 0,3 s lang ein Sternchensymbol in der oberen rechten Ecke des LCD. Beim Ausschalten des Stroms setzt das Programm die Werte des spezifischen Stromverbrauchs, der Durchschnittsgeschwindigkeit und der täglichen Kilometerleistung zurück. Zum Betrieb des Gerätes können Sie anstelle einer Batterie eine Laborstromquelle mit einer Ausgangsspannung von 25...50 V und einem zulässigen Laststrom von mindestens 5 A verwenden. Als Lastäquivalent können Sie eine leistungsstarke verwenden Drahtwiderstand mit einem Widerstand von 5...10 Ohm. Richten Sie das Gerät in der folgenden Reihenfolge ein. Kalibrieren Sie zunächst das Voltmeter. Dazu wird das Gerät über eine Batterie oder eine Laborstromquelle mit Spannung versorgt und mit einem genauen digitalen Voltmeter überwacht. Durch Ändern des Widerstandswerts des Abstimmwiderstands R9 werden gleiche Messwerte zwischen dem Standardvoltmeter und dem einzustellenden Gerät erreicht. Anschließend wird der Stromzähler kalibriert. Ein genaues digitales Amperemeter ist in Reihe mit der Last geschaltet. Durch Anlegen der Versorgungsspannung und Ändern des Widerstandswerts des Abstimmwiderstands R13 werden die gleichen Messwerte zwischen dem Standard-Amperemeter und dem einzustellenden Gerät erreicht. Bei Bedarf wird durch Auswahl des Widerstands R25 der optimale Kontrast des Bildes auf dem Indikator eingestellt. Der Bordcomputer kann in jedes geeignete Kunststoff- oder Metallgehäuse eingebaut werden. Platinendatei des Bordcomputers im Sprint Layout 5.0-Format und Mikrocontroller-Programm: ftp://ftp.radio.ru/pub/2016/05/tripcomp.zip. Literatur
Autor: A. Nefediev
Kunstleder zur Touch-Emulation
15.04.2024 Petgugu Global Katzenstreu
15.04.2024 Die Attraktivität fürsorglicher Männer
14.04.2024
▪ Das langlebigste Wirbeltier identifiziert ▪ Das Wasser wurde auf eine Rekordtemperatur erhitzt ▪ Schimpanse als Höhepunkt der Evolution ▪ Speicher Samsung DRAM CXL 2.0 128 GB
▪ Bereich der Telefonie-Site. Artikelauswahl ▪ Artikel-LED. Geschichte der Erfindung und Produktion ▪ Artikel Warum befindet sich auf dem Thron des Papstes ein umgekehrtes Kreuz? Ausführliche Antwort ▪ Artikel Leitungsinspektor der Hauptleitungen. Standardanweisung zum Arbeitsschutz
Startseite | Bibliothek | Artikel | Sitemap | Site-Überprüfungen
www.diagramm.com.ua |



 Hinterlasse deinen Kommentar zu diesem Artikel:
Hinterlasse deinen Kommentar zu diesem Artikel: